secondary control
The frequency domain models for the speed governor, turbine, and generator load can be combined to create a single governor controlled turbine which provides power to a load. This model has a single proportional control feedback loop, which is known in the literature as the primary control loop. If the speed changer signal is set to zero and the governor is allowed to operate under free governor operation, then for a step change in the load demand, , the primary controller will be able to arrest frequency deviations; however, will not be able to return the system frequency to the schedled value. This is not really a desirable property in a controller - we need to do something else.
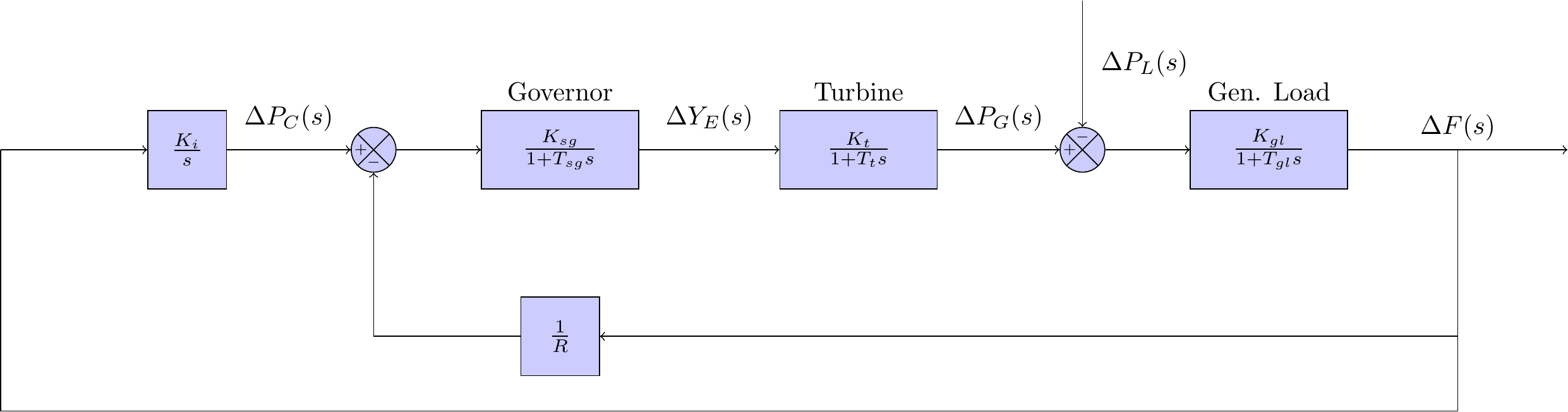
Motivated by the fact that the system frequecy can be returned to the scheduled value by adjusting , we add an additional feedback control loop to the system. The additional control loop using an integral controller, with gain parameter . This additional feedback loop is referred to as the secondary control in the literature. The primary and secondary controllers together form what is commonly know as a proportional integral (PI) controller. The updated block diagram of the system is shown in Figure 1.
Note that there is now only a single input to the system: the load demand . The step change for the load demand, in the frequency domain, can be expressed as:
Using algebra, and playing a whole lot of banjo music (or the Benny Hill theme song), the transfer function for the system in Figure 1 can be expressed as:
Using equation (1) and (2), we can model the frequency output for a step change to the load demand as follows:
Equation (3) can be re-expressed as:
As with the primary controller we analyse equation (4) as in order to understand the steady state of the system:
This is exactly the result that we were looking for! The analysis shows that, provided the models for the governor, turbine, and generator load are accurate representations, then a PI controller will be able to arrest frequency deviations and restore the system to it’s scheduled frequency, given a load demand perturbation.
Time for some simulation!